How to find the moment of inertia of a solid cylinder about transverse (perpendicular) axis passing through its center?
The solution is of one line -
I = (MR^2)/4 + (ML^2)/12
I didn't understand how (ML^2)/12 comes into play...
The solution is of one line -
I didn't understand how
1 Answer
It needs to be done in three steps.
1. Stating Moment of Inertia of a infinitesimally thin Disk.
2. Application of Perpendicular Axis and Parallel axis Theorems.
3. Integrating over the length of the cylinder.
But first of all let's state the problem.
Explanation:
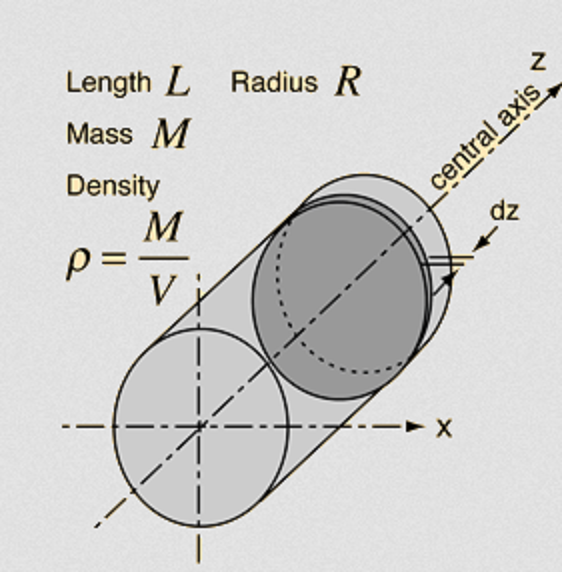
Figure 1.
 http://hyperphysics.phy-astr.gsu.edu
http://hyperphysics.phy-astr.gsu.edu
Let us consider a cylinder of length
We know that its density
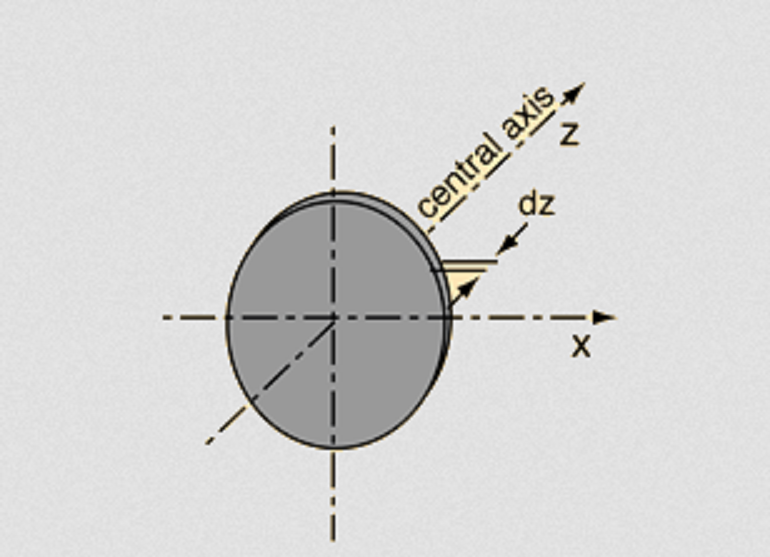
Figure 2.
 http://hyperphysics.phy-astr.gsu.edu
http://hyperphysics.phy-astr.gsu.edu
Let us consider that the cylinder is made up of infinitesimally thin disks each of thickness
or
since
or
Step 1.
We know that moment of inertia of a circular disk of mass
Step 2.
Observe from figure 2, that this moment of inertia has been calculated about
The moment of inertia about an axis which is perpendicular to the plane contained by the remaining two axes is the sum of the moments of inertia about these two perpendicular axes, through the same point in the plane of the object.
It follows that
Also from symmetry we see that moment of inertia about
Combining the equations (3) and (4) we obtain
or
Let the infinitesimal disk be located at a distance
Now we make use of the parallel axis theorem about the
The moment of inertia about any axis parallel to that axis through the center of mass is given by
where
Step 3.
Insert the value of
ignoring constant of integration because of it being definite integral.
or
or
