An object with a mass of #18 kg# is on a plane with an incline of # -(5 pi)/12 #. If it takes #9 N# to start pushing the object down the plane and #4 N# to keep pushing it, what are the coefficients of static and kinetic friction?
1 Answer

Explanation:
To determine the coefficients of (maximum) static and kinetic friction, we can set up a force diagram and take inventory of all of the forces acting on the object.
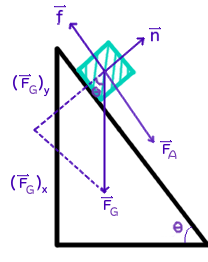
where
#vecn# is the normal force,#vecF_A# is the applied (pushing) force,#vecf# is the force of friction, and#vecF_G# is the force of gravity, decomposed into its parallel and perpendicular components
Since we're pushing the object down the plane, I'm going to define down the ramp as the positive direction. This choice is generally up to you.
Therefore, we have:
#color(darkblue)((F_x)_(n et)=sumF_x=F_A+(F_G)_x-f=ma_x)#
#color(darkblue)((F_y)_(n et)=sumF_y=n-(F_G)_y=ma_y)#
We are given the following information:
#"m"=18"kg"# #theta=(-5pi)/12->75^o# #F_A " to start moving" = 9"N"# #F_A " to keep moving" = 4"N"#
We'll begin with the coefficient of static friction. The force of static friction is given by:
#color(darkblue)(vecf_(s"max")=mu_svecn)#
We are told that it takes
This is actually true for both the parallel (x, horizontal) and perpendicular (y, vertical) directions, as the object does not move up and down, meaning that the perpendicular component of gravity is equal and opposite to the normal force.
#color(grey)((F_x)_(n et)=sumF_x=F_A+(F_G)_x-f_s=0)#
#color(grey)((F_y)_(n et)=sumF_y=n-(F_G)_y=0)#
Hence, we now have:
#F_A+(F_G)_x=f_s#
#n=(F_G)_y#
Using trigonometry, we see that:
#sin(theta)="opposite"/"hypotenuse"#
#=>sin(theta)=(F_G)_x/F_G#
#=>color(purple)((F_G)_x=F_Gsin(theta))#
Similarly, we find that
We also know that
#F_A+mgsin(theta)=mu_sn#
#=>F_A+mgsin(theta)=mu_smgcos(theta)#
Solving for
#color(crimson)(mu_s=(F_A+mgsin(theta))/(mgcos(theta)))#
Substituting in our known values:
#mu_s=((9"N")+(18"kg")(9.81"m"//"s"^2)sin(75^o))/((18"kg")(9.81"m"//"s"^2)cos(75^o))#
#=3.92898#
#~~color(indigo)(3.93)#
Therefore, the coefficient of maximum static friction is
For the coefficient of kinetic friction, we do much of the same, including the assumption of dynamic equilibrium.
#mu_k=(F_A+mgsin(theta))/(mgcos(theta))#
#=((4"N")+(18"kg")(9.81"m"//"s"^2)sin(75^o))/((18"kg")(9.81"m"//"s"^2)cos(75^o))#
#=3.8196#
#~~color(crimson)(3.82)#
Therefore, the coefficient of kinetic friction is
We would expect
